
2023/04/08 07:22

こんにちは!
SAKURA Tempestaです。
ハワイ大会から帰ってから、私たちは世界大会に向けて毎日ロボットの改良に取り組んでいます。
その進捗報告をしたいと思います。
今日はロボットの耐転倒テストとアームの自動制御の調整をしました!
耐転倒テストでは、私たちのロボットがハワイ大会で2回転倒したことを受けて、どのような状態だと倒れやすいのかをゲーム本番での動きを想定して検証しました。
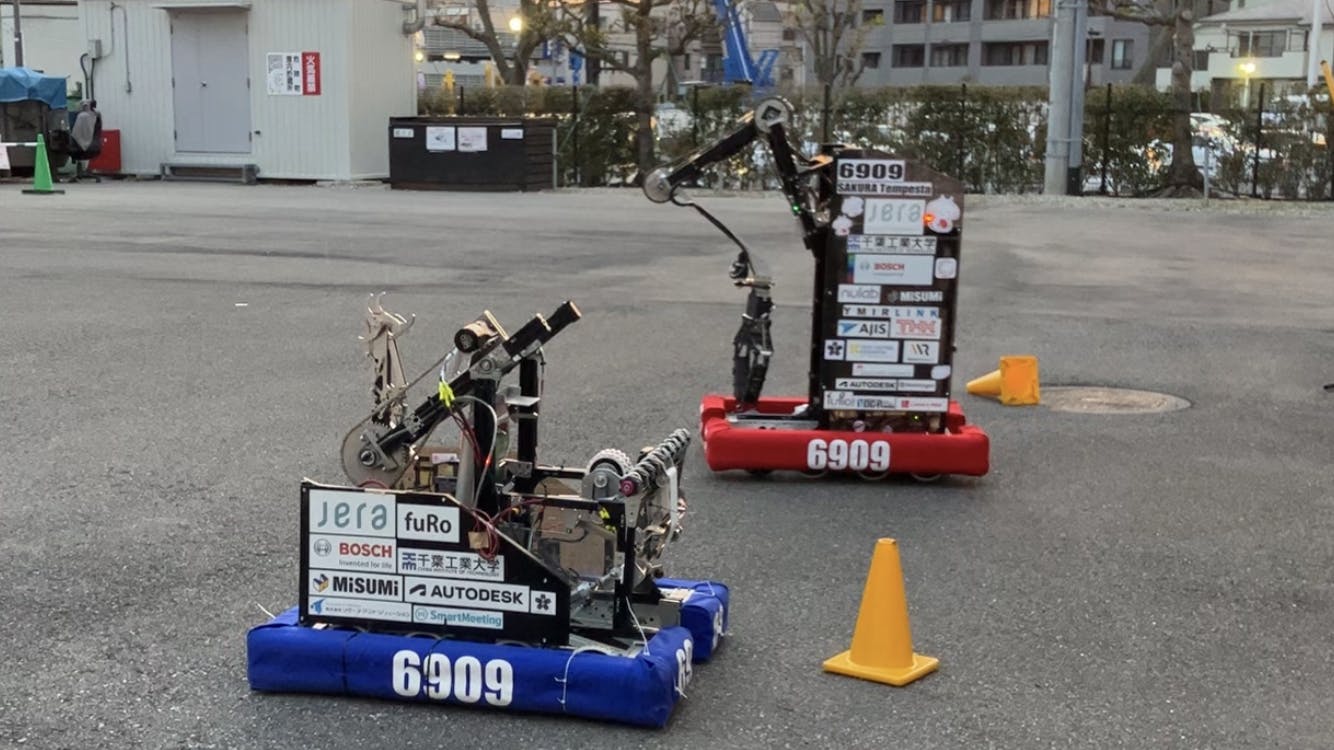
そしてこのテストをするために、昨シーズンのロボット「七桜」を久しぶりに動かしました。2台のロボットを同時に動かすことは、チームでも初めてのことです!
2台のロボットをぶつけ合いながら、どのようにぶつかると倒れてしまうのか、本番はどのように動けばいいのかを探っていきました。
ちなみにこのテスト中にも2回ほどロボットを倒してしまいました...
アームの自動制御の調整では、取り込んだキューブやコーンをアームが掴んでからノードにスコアするまでの自動制御を改良しました。
コーンノードに付いている反射テープをLimelightというセンサーを用いて検出し、アームの位置を自動で調整して得点できるようになりました!

Championshipまで、チーム一丸となって全力で頑張っていきます!
応援、ご支援よろしくお願いします!